Опель омега б не работает корректор фар

Вначале небольшое объяснение. По правилам, автомобиль. оборудованный ксеноновыми фарами должен быть также оборудован омывателем фар и автоматическим корректором фар.
В Омеге это все присутствует. Корректор работает всегда при включении зажигания, даже если фары не включены. Положение машины он определяет по двум датчикам. Один на левом заднем рычаге подвески, второй на левом переднем.
Как не печально, но обычно эта система не работает. Чаще всего из-за того, что сломан передний датчик, либо отсутствует полностью, либо выломана ось с рычагом и потеряна.
Задний датчик обычно более живучий и сохраняется в рабочем состоянии. Его обычный дефект — из корпуса датчика выпадает рычаг. Обычно его вставляют назад и заматывают чем-то, либо изолентой, либо резинку одевают и он нормально работает.
В случае неисправности хотя бы одного из датчиков система отключается, перестает что-либо двигать и выдает на экран бортового компьютера сообщение об ошибке Leuchtw Fahrlicht (Low Beam, если комп на английском).
Проще всего конечно заменить датчик, но он очень дорогой. Новый стоит $300, а б/у если и попадаются живые на разборе их забирают сразу же. Мне кажется за пластмассовую фигульку, цена которой 300 рублей платить 300 долларов это слишком. Поэтому попробуем придумать что-то.
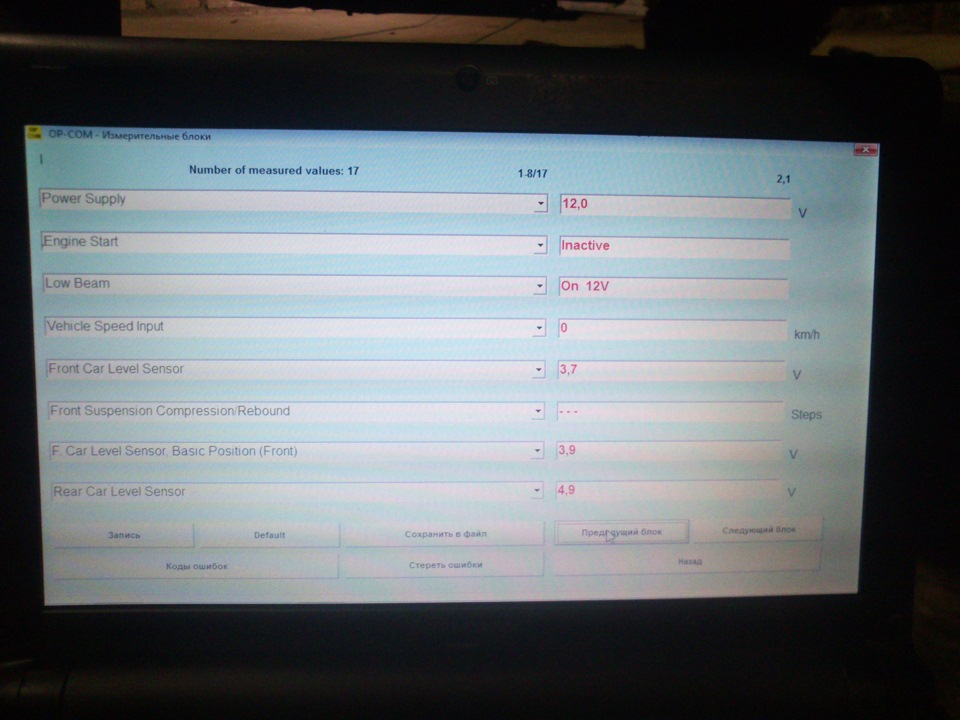
Подключил опком, посмотрел — блок показывает две ошибки по обоим датчикам. Задний потому что выпадает ось. Я ее вставил и обмотал датчик изолентой чтобы не выпадал и по нему ошибка ушла. Проверил датчик — прожимал подвеску, потом наоборот приподнимал — по опкому смотрю — показания датчика меняются, значит работает.
Дальше я сделал следующее, при включенном зажигании снял с переднего датчика разъем и оба корректора тут же с характерным звуком зашевелились. То есть, система в целом работает, а раз это дело работает, поставлю ему обманку!

Дальше всё аккуратно замотал изолентой, вывел провод в моторный отсек и положил рядом с бермудским треугольником.
Теперь система корректирует фары, руководствуясь только задним датчиком. А положение кузова в общем-то только там и меняется обычно. При проверке сразу отметил, что на БК больше ошибка не высвечивается. При включении зажигания иногда слышу звук срабатывания корректоров. Но не вверх-вниз, а чуть чуть, на одно положение типа корректировки, его и на глаз то не увидеть, только на слух.

После покупки у runner79 автомобиля у меня ниразу не работал на этом самом авто автокорректор фар, который штатно был установлен на мой ржопель 15 лет назад на заводе, потому что положено — лампы газоразрядные.
Проблема, на первый взгляд, была в отсутствии тяги переднего рычага. Которая, как известно, при износе вываливается и теряется. Раннер пожертвовал магнитик на холодильник, вырезал квадратик и ошибка пропала. Но мой долбаный перфекционизм не дает мне иногда жить спокойно. Первая проблема — отсутствие переднего датчика была устранена довольно быстро: удалось купить в остатках новый датчик за «смешные» 3000 рублей ( 😉 ) в Екатеринбурге. Но не тут то было — система по прежнему не работала. При резком старте или загрузке кормы фары резко дергались вверх.
Сначала, скинув колеса я методом тыка установил что алгоритмы переднего и заднего датчика перппутаны. И было подумал, что кто-то перекинул местами провода у блока. Я даже проделал обратную операцию, вмешавшись в проводку и перекрутив провода переднего и заднего датчика местами. Толку от этого было ноль целых, хрен десятых. Как и от форумчан на форумах опель-клуба и омега-клуба. Потом в комментариях к своей записи в блоге Лунный кот, он же Mooncat посоветовал мне не маяться дурью и я приобрел op-com.
С этой штукой дела пошли веселее: сразу стало понятно что дело в заднем датчике (который стоял, и был заведомо исправен, как мне казалось). Не тут до было. Блок управления фарами говорил, что с этого самого потенциометра он снимает аж 4.9 вольта.
Тут надо сделать отступление и рассказать про принцип работы этих самых датчиков. В системе регулировки фар используется два датчика, присоединенных через тягу к переднему и заднему рычагу левой стороны автомобиля. Датчики эти не обычные потенциометры, а бесконтактные герметичные штуки, работающие на эффекте Холла. В тяге есть резинка, в резинке квадратный магнит, резинка вставляется в грушу датчика. и свободно там вращается, никаких контактов в виде дорожек, понятое дело, нет. У датчика есть три выхода:


Я скинул колесо и принялся размышлять, как это так получилось, что приржавевший болтами потенциометр просится развернуться аж на 60 градусов. чтобы попать в рабочие углы. Я даже приволок старый датчик и стал крутить его, чтобы понять как правильно он должен стоять. Пока думал — крутил в руках тягу с резинкой и обратил внимание на шлиц, который так и хочется покрутить отверткой. И точно! Магнит крутится в резинке и можно выставить любой угол магнитного поля! Выходит кто-то славно покрутил отверткой и сбил показометр, в результате чего мой датчик при загрузке кормы выдавал сразу после 4.9 — 0.5 вольта и поэтому фары резко дергались вверх! Виден свет в конце тоннеля !


Передок работает наоборот: напряжение переднего датчика на домкрате должно быть 4.8 вольта, по мере опускания этот показатель опустится до 1.7-2В. Соответственно при росте напряжения фары опускаются, при уменьшении — поднимаются.
Юстировать можно и без op-com’а (но так же на домкрате, разжав подвеску!) достаточно крутить отверткой паз (если вы уверены в своих силах )) ) до момента когда фары перестанут подниматься (низкое напряжение — для заднего рычага), после чего чуть чуть вернуть взад, поймать момент. То же самое для переднего рычага, только момент ловим на нижнем положении фар (высокое напряжение). Не забудьте смазать «литолом» резиновую часть тяги, которая вставляется в датчик и тягу от рычага к тяге датчика.
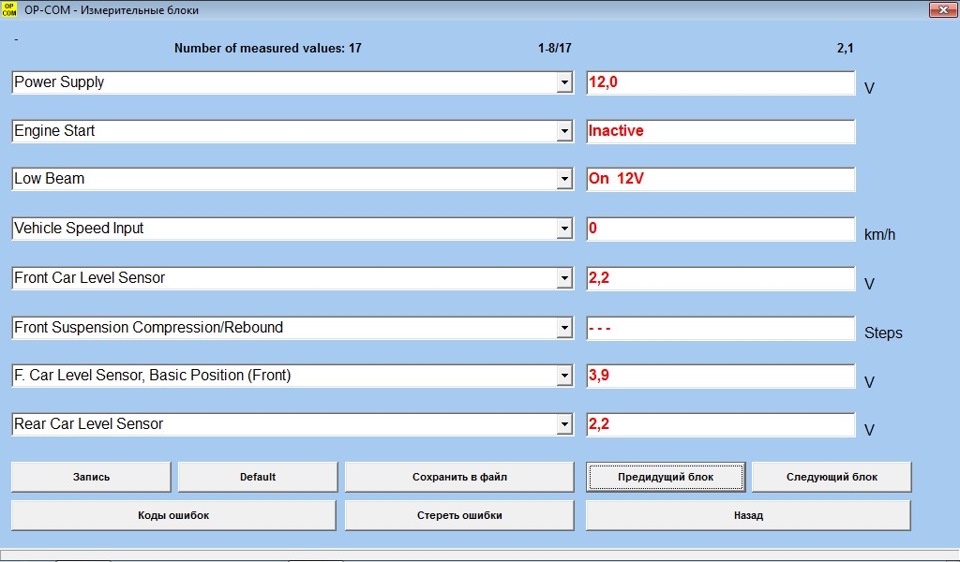
Вот и все. Остается только откалибровать все это хозяйство «в ноле»: на стоящей на ровной поверхности машине. (если конечно в этом есть необходимость) Без тещи, жучки и картопеля в багажнике. Мне юстировка понадобалось — так как Basic position (базовая позиция) переднего рычага была зашита со значением в 3.9 вольта. После того как я опустил машину с домкрата у меня оба рычага встали в 2.2V,
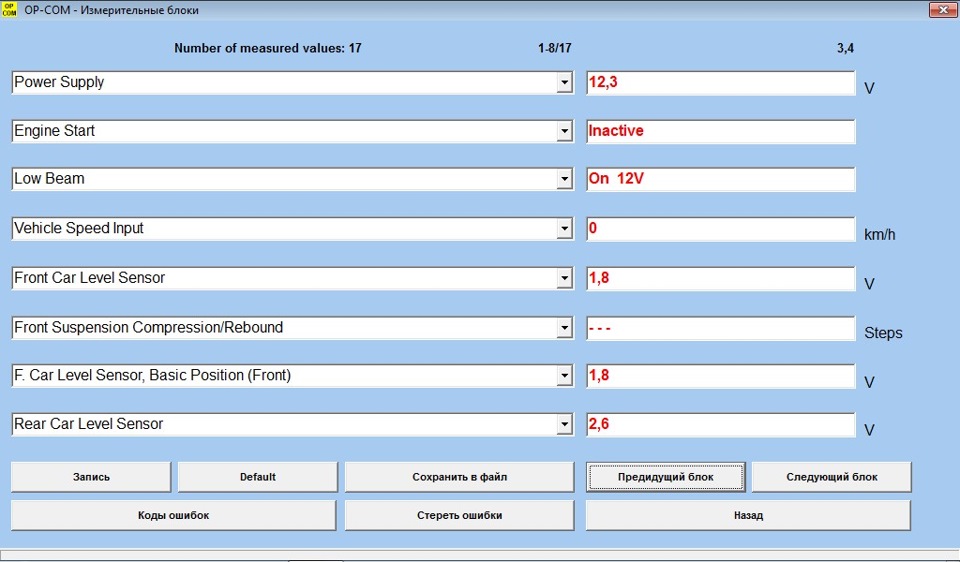
я покачал машину передний встал в 1.8V, а задний в 2.6V,
Теперь у вас все в нуле, и должно работать.
Если у вас нет одного из датчиков — ставьте рабочий назад, вместо переднего переменный резистор, как это сделал Mooncat , (между красно-коричневым и коричнево-белым), вращая его выставьте 2 вольта (можно измерять между коричнево-белым и черно-красным, если нет op-com), юстируйте (или не юстируйте )) ) и ездите без надоедливой ошибки low-beam )
Не забудьте зацепить страховку на случай выпадения тяги из датчика. Я сделал это обычной стяжкой:

Блок управления фарами находится под правым передним подкрылком:

Надеюсь, что кому-нибудь пригодится мой опыт.
Источник
Принцип работы корректора фар
Правильная граница светотени при движении ночью обеспечивает не только вашу безопасность, но и комфорт водителям встречных автомобилей. Рассмотрим, как работает корректор положения фар, устройство и принцип работы различных систем автоматической регулировки угла наклона фар.
Принцип действия
Корректор предназначен для регулировки уровня светотеневой границы в режиме ближнего света. Для режима дальнего света эта опция не так актуальна, потому что только ближний свет имеет четкую границу отсечки (условное ограничение светового потока, резко переходящего в почти неосвещенную зону). Ближний свет должен хорошо освещать дорогу, но не ослеплять водителей встречного транспорта.
Уровень светотеневой границы зависит от формы и вертикального наклона отражателя. Именно последний параметр требует постоянной регулировки, поскольку угол наклона фар зависит от нагрузки и распределения нагрузки в транспортном средстве. Чем больше загружена задняя часть автомобиля, тем больше прогибается передняя часть автомобиля. Поэтому даже правильно расположенные фары ослепят водителей встречных машин.
В соответствии с требованиями, предъявляемыми к автомобилям европейского производства, корректор фар должен входить в стандартную комплектацию всех автомобилей, допущенных к эксплуатации после 1999 г. Такие системы не устанавливаются на автомобили с активной подвеской.
Системы принудительного действия
Управление системой регулировки угла наклона фар осуществляется путем изменения положения переключателя на приборной панели. Основными типами приводов, используемых в конструкции ручных корректоров, являются:
- механический. Конструкцию рефлектора-корректора назвать сложно, так как устройство представляет собой регулировочный винт, установленный в корпусе рефлектора. Ввинчивание или выкручивание винта изменяет угол вертикального дефлектора;
- гидромеханический;
- электромеханический;
- пневматический. Пневматический корректор фар из-за своей сложности менее популярен. Систему можно настраивать вручную или автоматически. В первом случае управление пневмоприводами осуществляется водителем с помощью позиционного переключателя n на панели приборов (чаще всего используется в сочетании с галогенным освещением). Автоматизированная система состоит из датчиков положения кузова, блока управления и исполнительных механизмов (используются совместно с ксеноновыми лампами). Положение отражателя регулируется изменением давления воздуха в соответствующих трубках.
Гидрокорректор
Отечественным автомобилистам эта система известна, поскольку ручные корректоры фар этого типа устанавливались на автомобили ВАЗ 2107, 2109, 2110, 2114, «Нива», «Гранта».
Основные элементы системы:
- 6 — ручка регулировки светового пучка;
- 1 — основной регулирующий механизм;
- 2 — рабочие цилиндры со штоком, действующим на отражатель.
Принцип действия заключается в регулировке положения планки корректора движением специальной жидкости по трубам. Переключатель механически связан с поршнем главного гидроцилиндра. Когда ручка регулировки приводится в действие, чтобы поднять дефлекторы, давление жидкости в системе увеличивается, что приводит в движение рабочие цилиндры и, таким образом, удлиняет шток. Поскольку система полностью герметична, поворот ручки дает противоположный эффект.
Эта архаичная система считается крайне ненадежной. Со временем на стыках труб и фланцах возникают утечки, в результате чего в систему засасывается воздух и происходит потеря жидкости.
Электромеханический корректор
Чаще всего используется электрическая система регулировки дефлектора фар. Электропривод позволяет как принудительное изменение высоты границы света и тени, так и автоматическую регулировку в зависимости от текущих условий движения.
Конструкция систем принудительного действия:
- включить приборную панель;
- мотор-редукторы;
- устройство управления;
- электрические кабели.
ВыключательОбычно он устанавливается с левой стороны рулевой колонки и имеет 3–4 положения фиксации для изменения угла наклона дефлектора фары. Сервопривод, он же мотор-редуктор, он же корректор фар, представляет собой исполнительный механизм, шток которого при движении поднимает или опускает фару, опираясь на ее нижнюю часть (фара прикреплена к петлям вверху).
Принцип работы
В принципе, конструкция сервоприводов аналогична мотор-редуктору, используемому в конструкции центрального замка. Оборудование:
- Небольшой двигатель постоянного тока, возбуждаемый магнитами;
- червячную передачу для преобразования вращательного движения вала двигателя в возвратно-поступательное движение оправки;
- схемы управления;
- датчик сопротивления фактического положения штока поршня.
ЭБУ регулирует положение ручки, подавая управляющее напряжение на сервопривод. Логика управления корректорами фар с электромеханическим приводом на примере БУК 02-01 применяется во многих отечественных автомобилях. Одним из основных компонентов платы управления является мостовая схема мотор-редуктора, в основе которой лежит двухканальный операционный усилитель. Одно плечо моста соединено с датчиком фактического положения штока, а другое плечо соединено с входным контактом платы управления. Воздействие на исполнительный механизм корректора осуществляется изменением управляющего воздействия на входе платы. В случае ошибки несоответствия моста система управления подает напряжение на исполнительный механизм до тех пор, пока напряжение на выходах датчика положения не станет равным управляющему напряжению. Электронный блок управления в обязательном порядке должен быть оборудован устройством защиты от перенапряжения в бортовой сети автомобиля. Когда переключатель электромеханического корректора фар не меняет своего положения, электродвигатель отключается.
Характерные неисправности
- Обрыв цепи, образование оксидов в местах соединения.
- Износ деталей электродвигателя.
- Прогорание элементов интегральных схем.
Системы автоматического управления корректором фар
Автоматический корректор положения фар не требует участия водителя в настройке границы света и тени. Система, используемая в галогенных лампах, основана исключительно на положении кузова автомобиля, поэтому ее еще называют статической.
В автомобилях с ксеноновыми источниками света используется усовершенствованная система адаптивного затемнения, которая удерживает световой луч в фиксированном положении, регулируя положение кузова автомобиля при ускорении, замедлении, изменении направления и движении по ухабистой дороге. Он определяется таким образом, что прямой свет ксеноновых фар гораздо более агрессивен для человеческого глаза.
- датчики дорожного просвета автомобиля;
- устройство управления;
- сервоприводы (обычные электромеханические мотор-редукторы).
Датчик из установочного комплекта ксенона своими руками.
В основе принципа действия лежит постоянное считывание дорожного просвета автомобиля. Для этого используются бесконтактные датчики на эффекте Холла. Обычно несколько датчиков устанавливаются на несущих элементах кузова спереди и сзади. В корпусе находится статор (подвижный элемент) со встроенными магнитами и ротор (неподвижный элемент), который является датчиком Холла. Статор соединен стержнем с элементом подвески, поэтому любое изменение положения этого элемента относительно корпуса передается датчиком на ЭБУ. ЭБУ обрабатывает полученную информацию и контролирует работу мотор-редукторов. Несмотря на очевидное удобство, автоматический эквалайзер часто дооснащается системой, допускающей ручную настройку.
В конструкции можно использовать только один датчик положения тела ультразвукового типа. Чаще Такое решение предлагается в качестве альтернативы бортовых системах при самоклентации ксеноновых ламп.
Источник